��Զ�������� (IoT) ���Ƶij�������ͳ����������ƽ�����������ˢֱ�� (BLDC) ���Խ��Խ����������ͬ��Ӧ�á�����BLDC����������Ա���ٵ������������������Ŀ����㷨�ܸ��ӣ�����������ר�õġ���ʹ��һ�㹤��ʦ�����ں���ʱ�����������������ֵ����
������Աͨ��ֻ��ѡ���������������еĻ��������Ľ������������һ���������������������Ҳ�������������˼��㸺����������ʹ��ר�ü��ɵ�· (IC)�����߷�װ��������BLDC������ƹ��ܣ�����BLDC���ƴ�����ת�Ƶ����С�
�����������ۻ������������������������ר��Ӳ��оƬ�������֮��������������̽�����ʹ��Allegro MicroSystems��A4964KJPTR-T����רΪ������Ӧ��BLDC������ƶ���Ƶĵ�������������Ľ�չʾ�����A4964KJPTR-T�������Լ�һЩ����������Ϊ�����������
BLDC����������
BLDC����ڹ㷺���ٶȷ�Χ���ṩ��ЧŤ�����ͣ�����С��û����ˢ����Ļ�еĦ����BLDC����ɵ������ǵ�ѹ���ƣ���;�㷺������״���ߴ�ͳɱ�Ҳ��Ӧ�ò�ͬ�����졣
���磬TRINAMIC MoTIon Control��QBL4208-41-04-006��һ��24V��4000RPM�ĵ�������ṩ�ߴ�0.06Nm��Ť�أ�ͼ1�����õ�������ɣ�0.662lb������Ϊ������Ա�ṩ�˶��ֵ������ѡ����ͨ��ʹ�÷��綯�� (BEMF) ����������������ʹ���ܱ���λ�õ����ô�������

ͼ1��QBL4208-41-04-006��һ��24V��4000RPM BLDC���������ٶ��¿��ṩ�Ը���0.06Nm��Ť�ء���ͼƬ��Դ��TRINAMIC MoTIon Control GmbH��
�������Ť�أ������Ա����ʹ��QBL4208-41-04-025�������Ҳ������TRINAMICMoTIon Control��ͼ2��������һ��24V��4000RPM BLDC��������ṩ�Ը���0.25Nm��Ť�ء�

ͼ2��TRINAMIC MoTIon Control��QBL4208-41-04-025��һ��24V��4000 RPM BLDC���������ٶ��¿��ṩ�Ը���0.25Nm��Ť�ء���ͼƬ��Դ��TRINAMIC Motion Control GmbH��
BLDC���ͨ�������������������ų����ų����ƶ����ô�����ʹ�����ƶ���ת�������
�����ϣ��������������ף���ʵ���ϣ�����BLDC����൱���ӣ�������Աֻ��ѡ��ʹ������������������������ѡ��ר��оƬ���������
������ר��оƬ�������
�ڽ�����ת��BLDC���������ʱ��������ԱӦ�ÿ����������ء���Щ���ػ����Ͽɹ��Ϊ��
BOM�ɱ����˹��ɱ�
��·�帴����������������
ά��ʱ��ͳɱ�
��Ӳ���ĽǶ�������������·�߿��ܷdz�������������Ϊר��оƬ����������BOM����һЩ����ijɱ�������ʹ��ר��оƬ������ȥ���óɱ��������ٵ�Ǯȥ���������������п����㷨�Ž�������������ƺ���˫Ӯ�����������Ŷ�����û���ǵ��þ�����ȫ�������
�ǵģ�BOM�ɱ������ˣ����������������˶��⸺����Ҫ����BLDC״̬���ݲ�������������������������Ҫ���������������в����������ߵ�ͨ���Լ����������豸����ô�Բ�ע�⣬����������ά���ɱ��Ϳ���ͻ�����ǡ�
�������������л��������Ľ�������߱�����ԣ���Ϊ�Ŷӿ��������������㷨��ʹ������Ҳ������ζ�������ܻ����ڼ��ȸ��ӡ�
���磬ͨ������£�����������㷨������������ռ�ø����RAM������Ҫ�������档Ȼ��������Ŷ�ʹ��רΪ������ƶ���Ƶ�����������Texas Instruments��F280049CRSHSR����������������㷨��������������ROM�Ŀ��С�����ζ����Ӧ�ó������ӵĶ������ֻ�жԿ���з��ʵĺ������ã����з��صĹ������ɸÿ���ɡ�
������ת��BLDC������������������⣬����ҪӲ����ͼ3��ʾ��ʹ��C2000��������Ӧ��ʵ��������F280049CRSHSR�Ǹ�ϵ�еij�Ա����ͼ˵��������BLDC��������һ���Լ���ѡ�����������������Ҫij������ʼ�����������BLDC�����������λ��ʹ���ת����
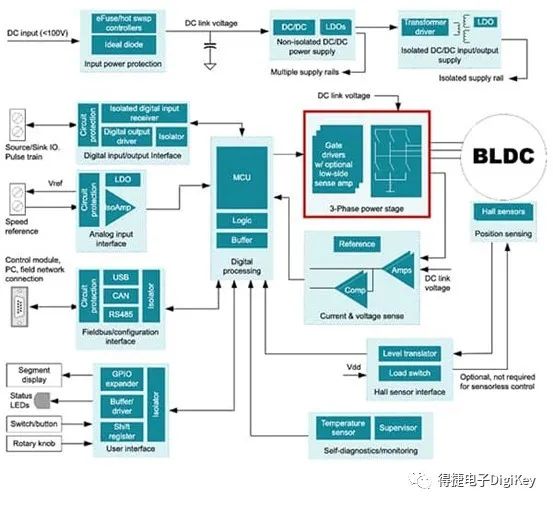
ͼ3��Texas Instruments��C2000������רΪ�������Ӧ�ö���ơ���ͼΪӦ��ʵ�����м���������������Ϊ����BLDC����ı���Ϳ�ѡ��·����ͼƬ��Դ��TexasInstruments��
��������������������ɾ�������������ר��Ӳ�����������ô���أ�����������Allegro MicroSystems��A4964KJPTR-T���������оƬ��
Allegro MicroSystems��A4964KJPTR-T���������
Allegro MicroSystems��A4964KJPTR-T�������оƬ��ר��BLDC��������������а���������������������������ͼ4������оƬרΪ����Ӧ�ö���ƣ�����N����MOSFET����ʹ�ã����������������ͻ����ܣ������Ҫ���ⲿӲ�����١�A4964KJPTR-T�Ĺ�����ѹ��ΧҲ�ܹ㣬��5.5V��50V����������������ϵͳ�����Ҽ������������б�Ӧ�á�
A4964KJPTR-T������עĿ�����Ի����ǣ�����ͨ����������ӿ� (SPI) ����������������ӿ��Ƶ�Ԫ (ECU) �����ӣ������õ�����еĸ��ּĴ�������Ȼ��������������Ҫ�����е�������㷨����������������ǿ��
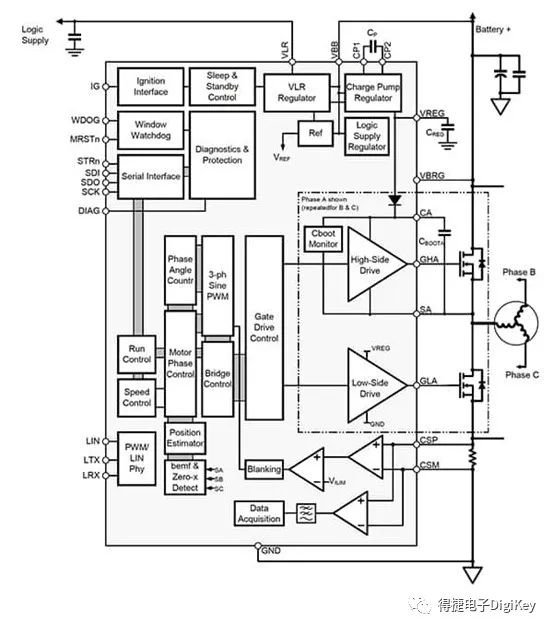
ͼ4��A4964KJPTR-T BLDC���������������ѹΪ5.5V��50V���ṩ�����������ͻ�����ٶȿ�ͨ��SPI��ר��PWM�źŽ������á���ͼƬ��Դ��AllegroMicroSystems��
���⣬����������ǣ�A4964KJPTR-T����ٶ�Ҳ������û��SPI�������������ֻ���ṩ������ȵ��� (PWM) �źż��ɡ����з���ʧ�Դ洢�����Դ洢������ã��ϵ�ʱ������Щ���ã�����ֻ��PWM�ź������Ƶ����
�����ýǶȶ��ԣ�A4964KJPTR-T��32����Ѱַ16λ�Ĵ��������һ��״̬�Ĵ�����״̬�Ĵ����ܶ��أ�ÿ��SP��/д����ʱ����ǰ5λ���Ա��������Լ��һ��״̬���˽��Ƿ����κι��ϻ����⡣��оƬִ��д����ʱ��A4964KJPTR-T����ش����ݣ���˿��Զ�ȡ����״̬�Ĵ�����
��32����Ѱַ�Ĵ����У�������������Ĵ������Ĵ���30��ֻд�Ĵ������Ĵ���31��ֻ���Ĵ�����ֻд�Ĵ�������������Ա��0 �C 1023֮���ֵ�����������룬�����������ռ�ձ����ʡ�ֻ���Ĵ��������ݸ���д��Ĵ���29�����ض�ѡ��Ĵ��������������ݶ��ı䡣�üĴ���������������ң����Ϣ�����磺
���
����ٶ�
ƽ���������
�����ѹ
оƬ�¶�
��������
Ӧ�õ��ŷ�ֵռ�ձ�
Ӧ�õ���λǰ��
������Щ����Ĵ���������30���Ĵ��������Ծ���ĵ��Ӧ�ý��е�����������ʹ�ܻ���ù��ϣ���������դ���������ϡ�
ר�õ���������������壬�佫���е������ĸ������ö��洢�ڼ�ʮ�����üĴ����С��⼫���������������ԭ�������������������Ҳ������Ҫ���ǣ�������ؽ���������������ά���ɱ�������BLDC�����Ƿ���PWM���ⲻ��������������κο�����������ʹ�ܵ��λ���ṩ����SPI������������ת��BLDC��
A4964KJPTR-Tʹ�ü��������
A4964KJPTR-T�����Ӻܼ������ǿ�����ԱӦ�μǵļ�������������ϡ������Լͼӿ����ǵĿ��������磺
״̬�Ĵ�����ÿ��д��оƬʱ����ͨ��SPI�ӿڷ��أ�����������ר�ŵĿ�Ѱַ�Ĵ���������ζ������������д��оƬʱ��Ҫ���SPI����SDO��·�Ի��״̬��Ϣ��
������Ϣ������״̬�Ĵ����У������������ṩ��ַ������Ϣʱ����ǰ��λ�п��Կ���ÿ��SPI�����оƬ״̬�����������ݿ�����ȷ���Ƿ�����κ����⡣
�洢��ӳ�������������صļĴ�����һ��ֻ����һ��ֻд����ܼ���Ҫע�ⲻҪ��ͼ��ȡֻд�Ĵ�������������Ѷ������е��κ�α����д��üĴ����С�
��оƬ�з���ʧ�Դ洢���������ڴ洢Ĭ�ϲ�������Щ���������ص�RAM�У���������ʱʹ�á�Ϊȷ��оƬ����Ч�������������״̬��Ӧ������ȫ������ֵд��оƬ��
����ն��豸�����ӻ��ط��价����ʹ�ã���ô���Ӧ�ó�����붨������ȷ�����������Dz��������⡣оƬ���ô洢��RAM�У�����ζ�����������ܵ��������ߡ�λ��ת�Լ����п��ܷ����ڵ��Ӳ�Ʒ�е���֡������¼���Ӱ�졣
������
����������������������Ӧ�õ�BLDC���ʵ���൱�ձ飬��������ܸ��ӡ�Ϊ��Ӧ�����������ԣ�������Ա����ʹ��ר��BLDC�������������A4964KJPTR-T�����з�װ�����е�����ƹ��ܡ�
��Ȼ��Ȼ��Ҫ������оƬ������������������������ֻ��Ҫ�趨�������ã�A4964KJPTR-T�ͻḺ���������������ʹ��A4964KJPTR-Tʱ��������Ա�ᷢ�֣���ѭ���ṩ�ġ���������ϡ���������ʡ����ʱ�䣬���������鷳��