前言
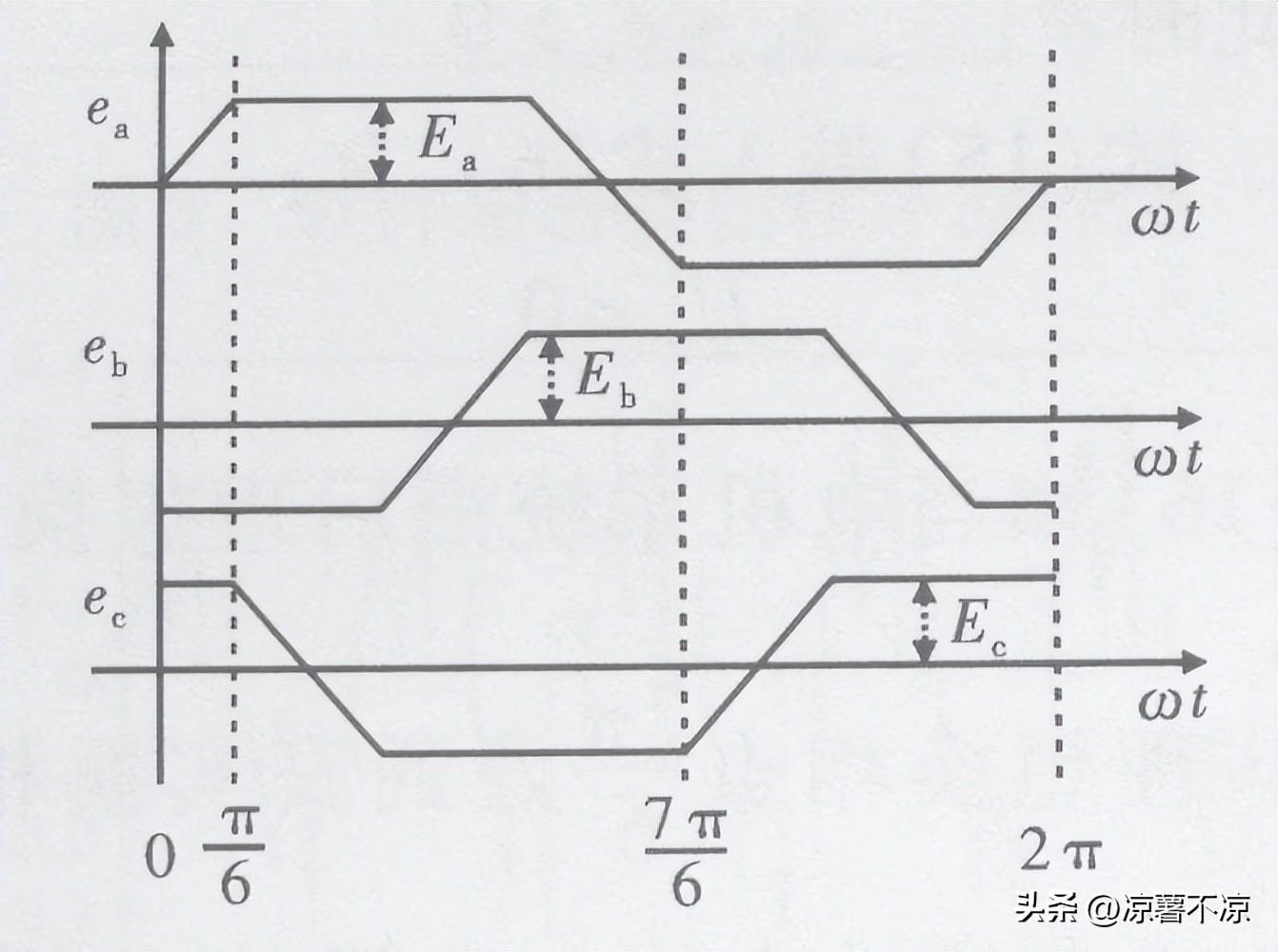
无刷直流电动机的反电动势波形一般为梯形波,但在实际应用中,为了消除齿槽转矩。常采用斜槽、分数槽、合理设计磁极形状和充磁方向等措施。
这些措施往往使得电机的反电动势波形更接近正弦对于这类电机。采用正弦波电流驱动比采用120度导通型三相六状态方波驱动更有利于减小电磁转矩脉动。
但是传统的正弦波驱动无刷直流电动机的电流控制方法,不管是三相电流跟踪法 还是i i 型矢量控制法。
除了控制算法复杂,都需要知道连续的转子位置信号一般通过高分辨率的光电编码器来获取。
采用光码盘一方面增加了系统的体积,在一些对体积要求比较严格的场合无法使用另一方面大大增加了系统的成本。
而对于家电等消费类产品,成本是一个很重要的制约因素。因此寻求利用方波型无刷直流电机三个霍尔元件产生的六个离散位置信号来实现正弦波电流驱动,具有重要的现实意义。
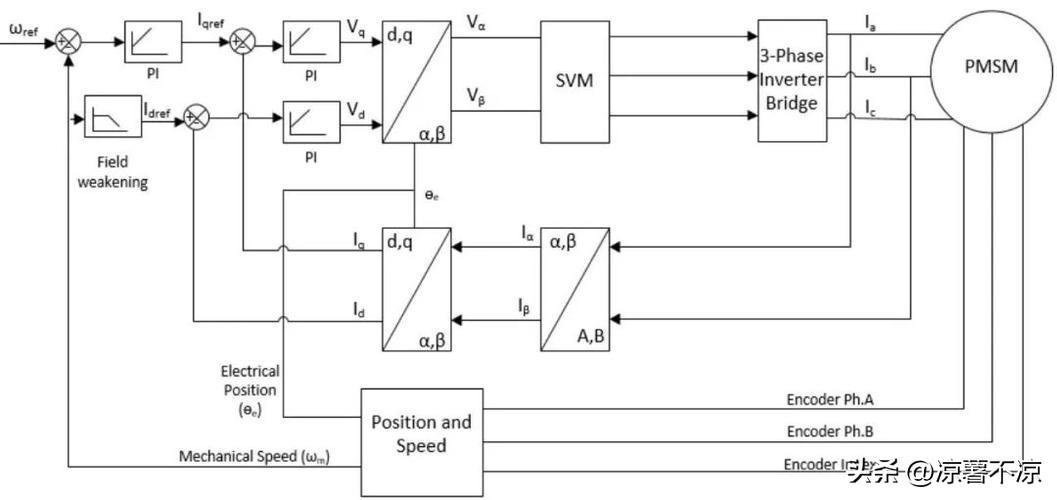
电压空间矢量法(SVPWM)控制
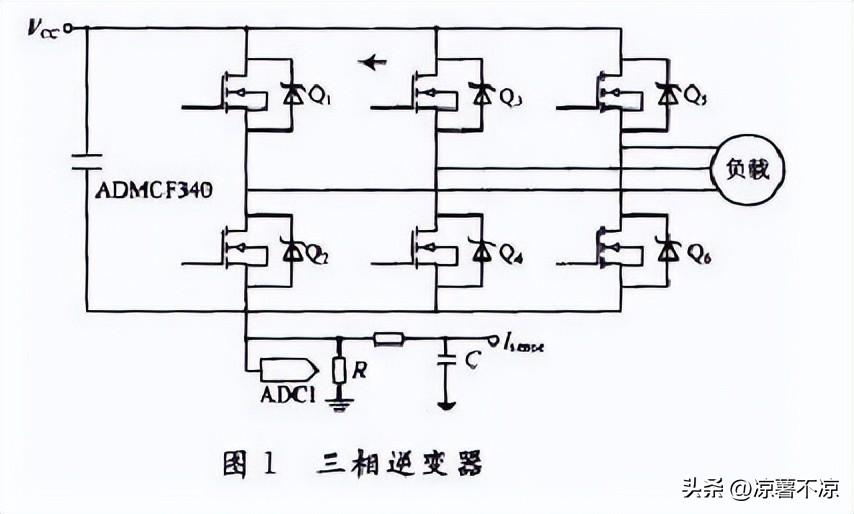
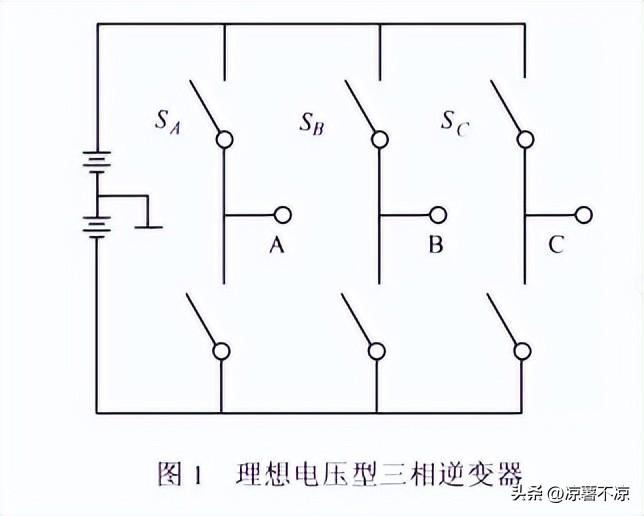
基本控制思想是典型的电压型逆变器结构,由于同一桥臂上下功率管不会同时导通。
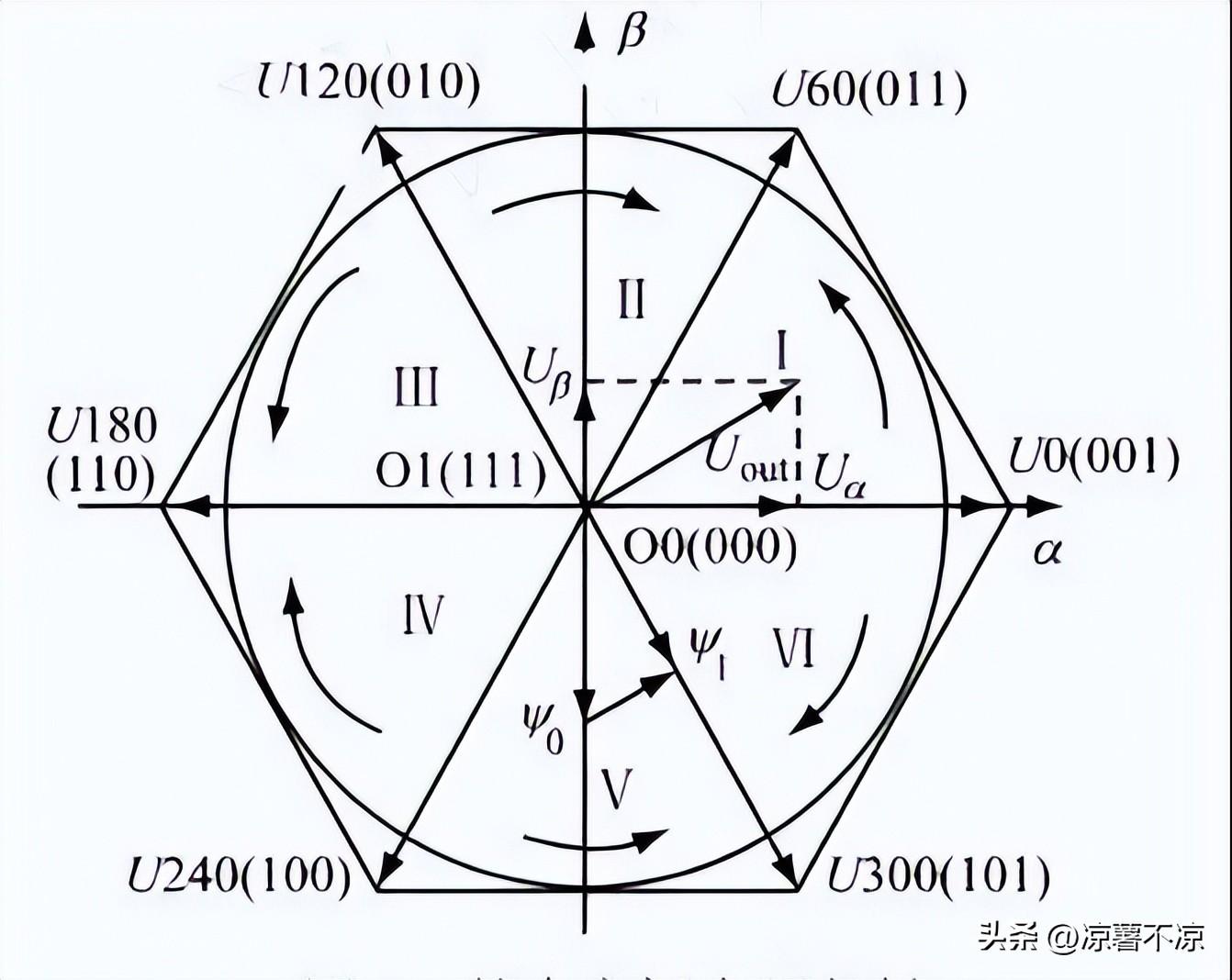
因此可以仅用三个变量SSSc来表示六个功率管的开关状态,当S=1时表示逆变器A相上桥臂通,S=0时为A相下桥臂通。其余两相类推。这样一来。三相共有8种开关状态。
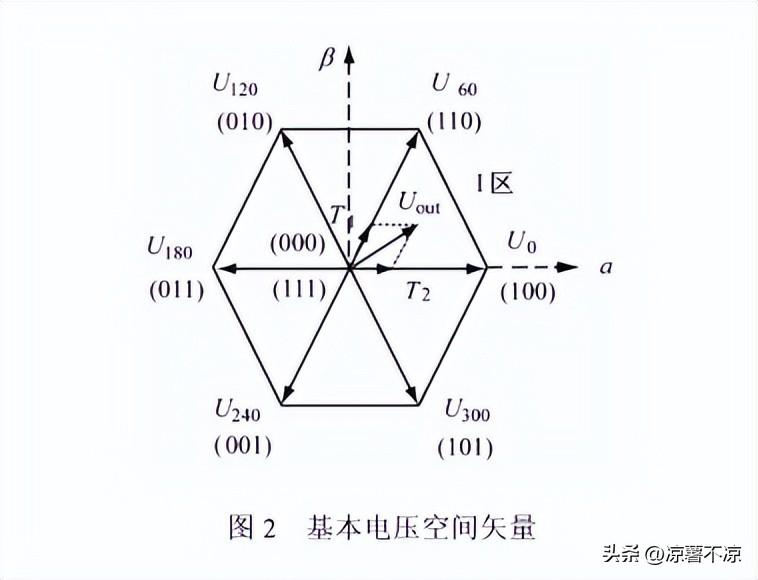
这8种开关状态所对应的三相输出电压变换到a坐标系下的电压空间矢量。
如果控制逆变器,使其按U0,U60,U120,U180,U240,U300的顺序,每隔60度电角切换一次开关状态。
一个周期切换六次,这就是典型的180度导通型六拍逆变器的运动方式。
由于常用的无刷直流电机一般都提供六个离散的转子位置信号。如果在位置信号翻转的时刻切换电压空间矢量,就可以实现180度导通型的自控式运行。
如果要使输出相电压更接近正弦波。可以按照SVPWM的控制方法把每个60度区间进行N等分。
每个小区间通过相邻两基本矢量和零矢量的组合来合成该区间的电压空间矢量,这样一个周期将有6N个电压空间矢量,每隔60/N电角切换一次。
为了实现无刷直流电机的自控式运行切换时刻仍必须由转子位置信号决定,即转子转过60/N电角。电压空间矢量切换一次。
问题是总共只有6个确定的离散位置信号,如何确定两个位置信号之间转子的实际位置,是保证无刷直流电机自同步运行的关键。
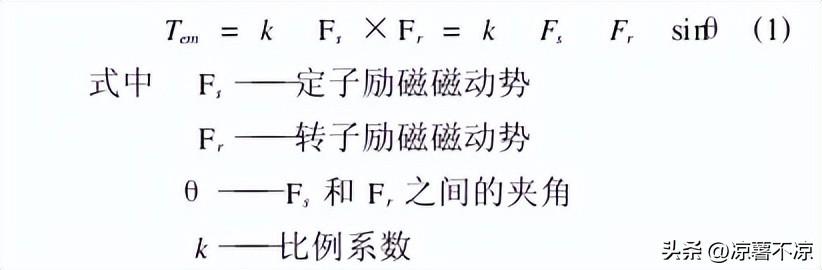
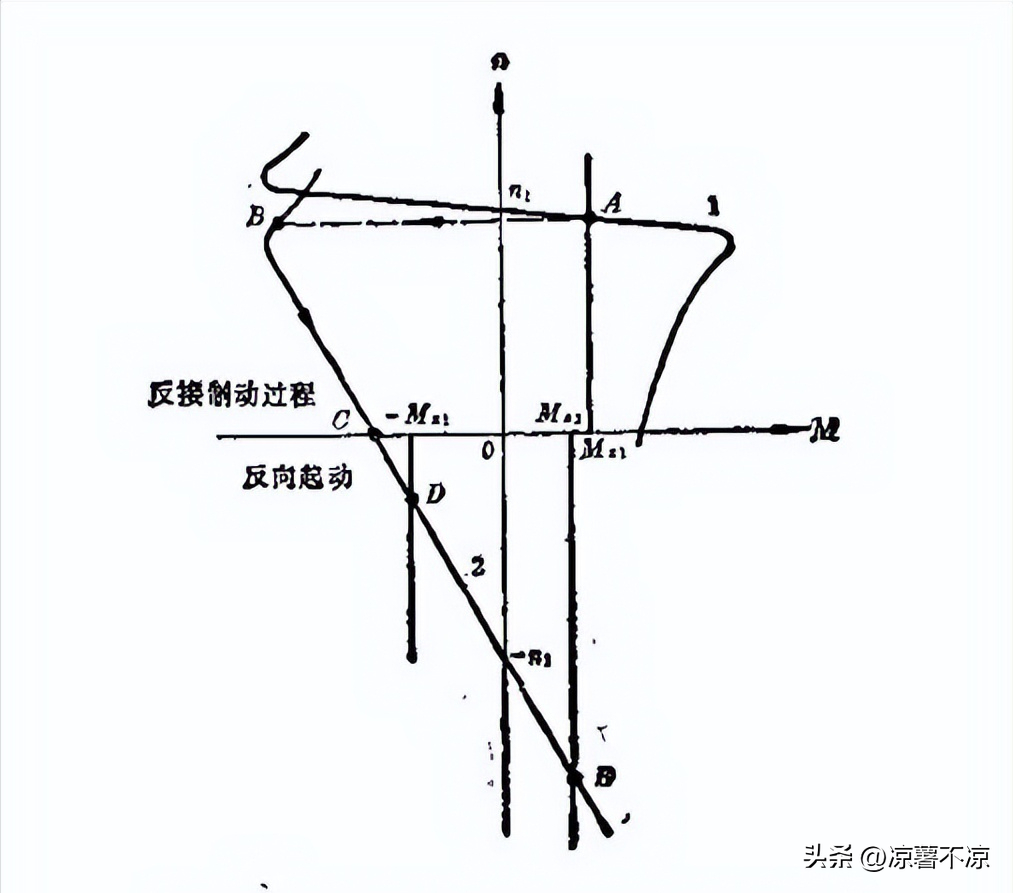
按照电机学理论,无刷直流电动机的电磁转矩有两个因素可引起电磁转矩脉动,一是定子励磁磁动势F幅值的变化,二是定子磁动势与转子磁动势夹角的变化。
而上面所提的SVPWM控制方法能够保证电压空间矢量和转子以恒定的夹角同步旋转。
由于定子电流空间矢量以恒定的夹角与电压空间矢量同步旋转,而定子磁动势又由定子电流产生,最终使定子磁动势与转子以恒定的夹角同步旋转。
这种控制方法能够消除因定、转子夹角变化而引起的电磁转矩脉动,其最大的优点是硬件结构,软件算法都比真正的 PMSM矢量控制要简单。
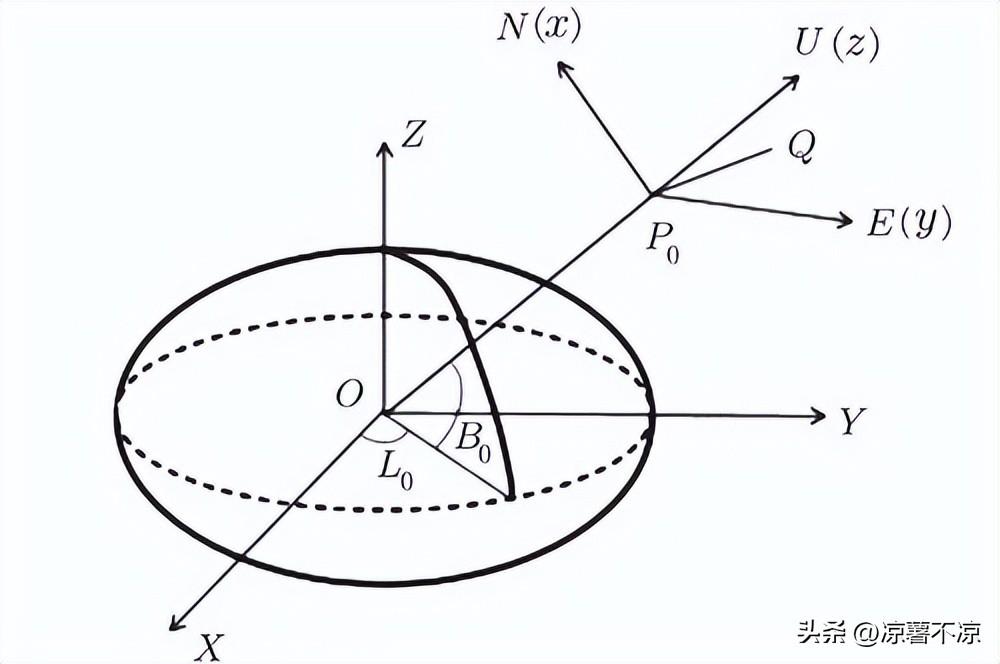
电空间矢量初始定位
为了实现自同步运行并顺利起动,采用电压空间矢量控制必须进行初始定位,即在电机停转时,根据当前转子的实际位置,确定电压空间矢量的初始相位。
为了使产生的电磁转矩最大必须保持定、转子磁动势之间的夹角为90度电角,设定子电压空间矢量超前定子电流空间矢量为电角。
而定子电流空间矢量与定子磁动势同相位,因此必须使定子电压空间矢量超前转子磁动势电角。
如果三相位置传感器的安装定位,使得当转子磁极轴线位于A相反电动势的过零点处时A相位置传感器输出信号发生跳变。
触发A相绕组导通,则可以确定转子位于某个60度区间时。电压空间矢量的初始相位角,此处,代表a・坐标系下。
当霍尔传感器输出的三相位置信号,根据以上原则确定的三相位置信号与电压空间矢量的初始相位角。
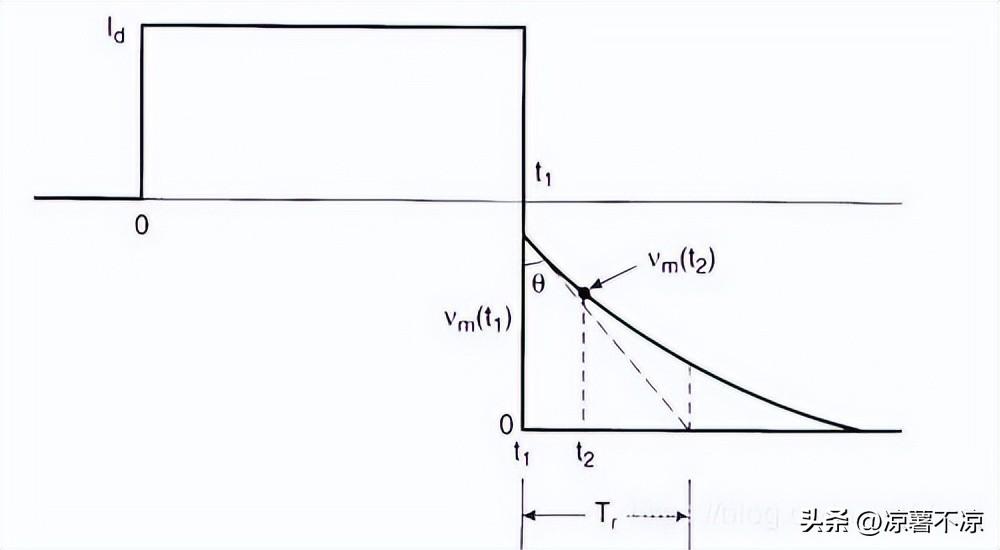
转子位置的估计
采用电压空间矢量法来控制无刷直流电动机,实现自同步运行,与控制异步电动机的本质区别在于:
电压空间矢量的旋转频率受位置检测器的控制即定子旋转磁场的转速和转子的转速始终相等。
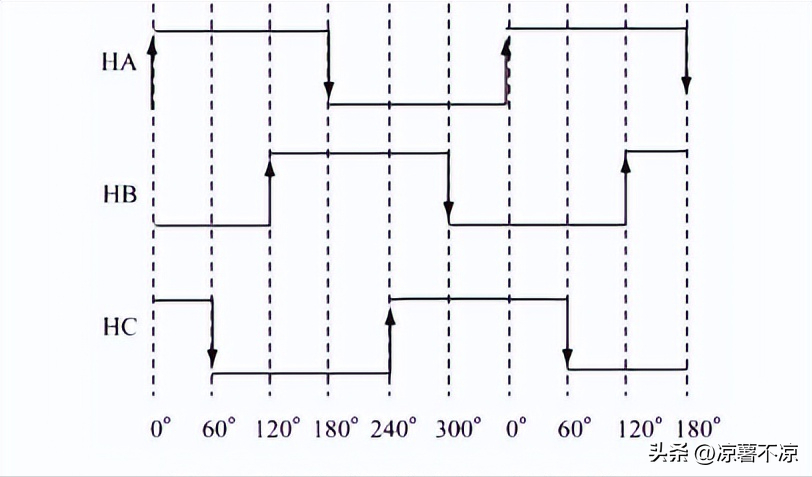
三相霍尔元件输出的位置信号,每隔60度电角,便有一个位置信号发生跳变,这样在一个周期内有6个转子位置可以被确定。
当逆变器采用六拍运行方式时,电压空间矢量每隔60度电角切换一次/
以三相位置信号的跳变时刻做为电压空间矢量的切换时刻就可以实现无刷直流电动机的自同步运行。不再需要额外的转子位置信息。
为了使输出的相电压更逼近正弦波,按照SVPWM的控制方法,把每个60度区间进行N等分。
每个小区间通过相邻两基本关量和零矢量的组合来合成该区间的电压空间矢量,这样一个周期将有6N个电压空间矢量每隔60/N电角切换一次。
为了实现自同步运行必须知道每个60/N电角所持续的时间,考虑到系统的机械时间常数大于电气时间。
常数可以假设一个60度区间内转子的转速不发生变化。这样如果知道每个60度区间所持续的时间。
除以N等分,就可得到每个60/N电角所持续的时间,但是当前60度区间持续的时间不可能事先得到,实际实现时只能用上一个60度区间所持续的时间来近似代替当前60度区间的持续时间。
电机实际运行时,由于转速的波动,相邻两个60度区间持续的时间不一定相同当用上一个60度区间所持续的时间来估算当前60度区间内每个60/N电角所持续的时间。
必然会有一定的误差,如果不进行位置校正,当误差积累超过一定角度时,电压空间矢量与转子d轴之间的实际相位角将发生错位,造成电机的失步振荡直至停转。
利用三相位置信号提供的6个确定的转子位置每隔60度电角对电压空间矢量的相位进行一次校正,可以消除位置误差的积累。
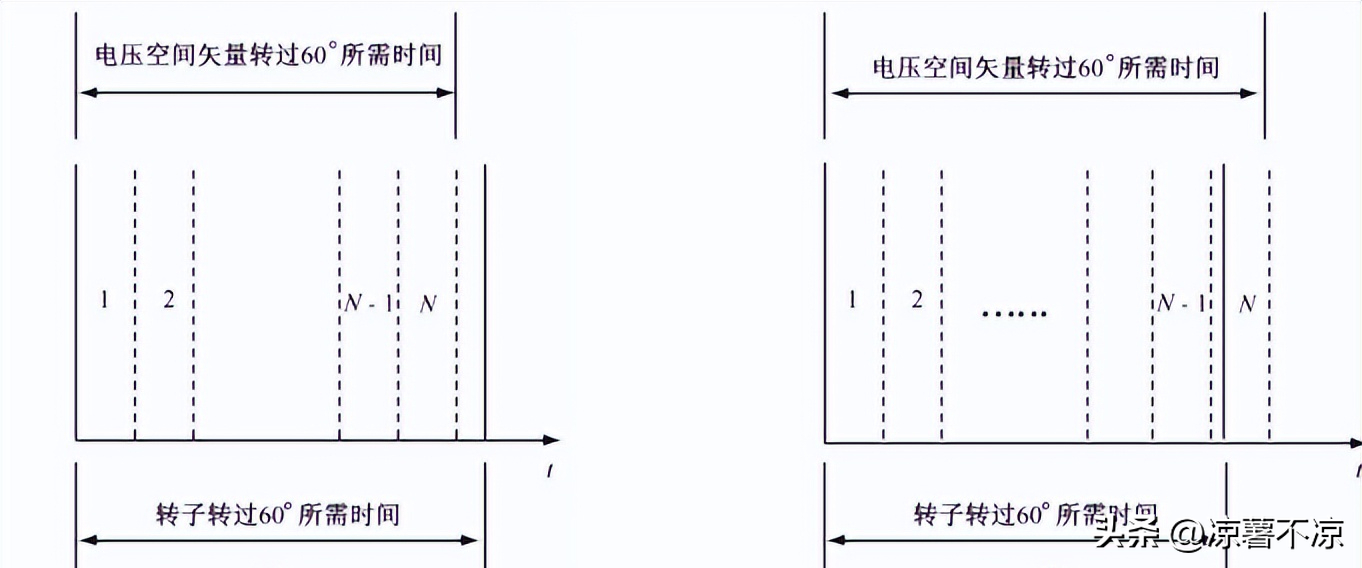
系统实际运行时,当60度位置校正信号来临时,电压空间矢量的实际相位角可能超前或滞后基准位置。
电压空间矢量已经转过60度电角但实际转子还没有转完60度电角,此时应保持电压空间矢量的相位不变,直到转子转过60度电角产生校准信号才做切换。
转子已经转过60度电角,但电压空间矢量还没有转完60度电角,此时应立即将电压空间矢量的相位切换至校正相位。
经过上述位置信号的预估校正后,可以使电压空间矢量与转子位置同步旋转,保证无刷直流电动机的自同步运行。
仿真及实验结果
本文对一台300W三相Y型永磁无刷直流电动机进行仿真及实验研究。样机的具体参数为:极对数p=4。相电感L=2。4mH,相电阻R=0。452Ω。调速范围0~1300r/min,实测反电势波形接近正弦。
样机在传统三相六状态120度导通方式及SVPWM控制方式下的相电流及电磁转矩的仿真可能事先得到。
实际实现时只能用上一个60度区间所持续的时间来近似代替当前60度区间的持续时间。
电机实际运行时,由于转速的波动相邻两个60度区间持续的时间不一定相同当用上一个60度区间所持续的时间来估算当前60度区间内每个60/N电角所持续的时间。
必然会有一定的误差,如果不进行位置校正当误差积累超过一定角度时。电压空间矢量与转子d轴之间的实际相位角将发生错位,造成电机的失步振荡直至停转。
利用三相位置信号提供的6个确定的转子位置每隔60度电角对电压空间矢量的相位进行一次校正,可以消除位置误差的积累。
系统实际运行时,当60度位置校正信号来临时,电压空间矢量的实际相位角可能超前或滞后基准位置,电压空间矢量已经转过60度电角。
但实际转子还没有转完60度电角,此时应保持电压空间矢量的相位不变直到转子转过60度电角产生校准信号才做切换。
情况刚好相反。转子已经转过60度电角,但电压空间矢量还没有转完60度电角,此时应立即将电压空间矢量的相位切换至校正相位。
经过上述位詈信号的预估校正后,可以使电压空间矢量与转子位置同步旋转,保证无刷直流电动机的自同步运行。
SVPWM控制方式下的转矩脉动明显小于传统120度导通方式。
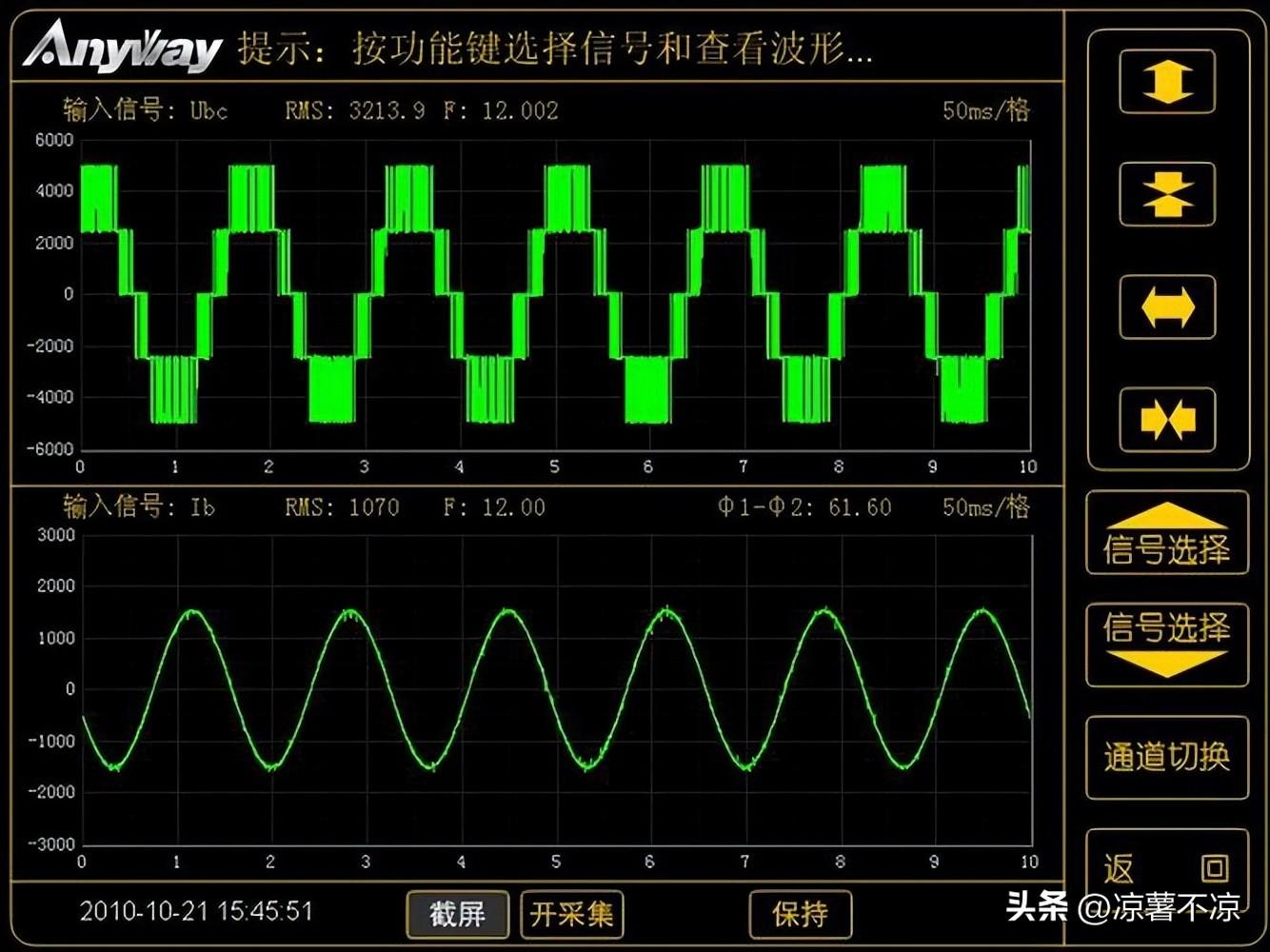
样机在两种控制方式下的相电流及电磁转矩实测波形,三相六状态120度导通方式下绕组相电流有效值为3。
2A时,产生的平均电磁转矩约为 1。25N m,转矩电流比为 0。39 ,转矩脉动系数为50%。
自同步SVPWM控制方式下在绕量逼近圆周运动。转速测量用该芯片的脉冲捕获单元14。
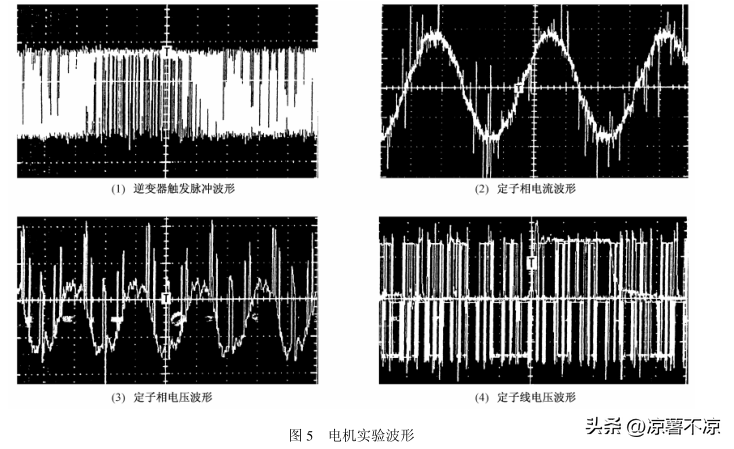
实验结果
本文针对上述的控制方案进行了实验研究。电机为2对极三相笼型异步电机,直流侧电源是6 结论由上述结果可得出以下结论:
本文所设计的双DSP结构矢量控制系统中各子系统分工明确,能可靠完成各自功能,且设计合理。
实验表明,系统控制精度高、实时性好、动态响应快。通过整流桥对三相交流电整流、滤波产生的。电机额定参数为:Pn=1。
5kW;Un=220V;In=3。55A;fn=50Hz;n=1400r/min。电机稳态运行时,逆变器的驱动波形定子电流、电压的波形,实验结果表明了控制方案的优良性能。