M32SPIN0280 是灵动微电机新推出的针对电机控制市场的专用 MCU,该系列 MCU 搭载了Arm®Cortex®-M0 内核,最高工作频率可达 96MHz,内置高速存储器,并集成了 I/O 端口和多种外设。MM32SPIN0280 系列 MCU 适用于各类电机应用场景,其典型应用包括风机、水泵、电动自行车、服务器风机 、吊扇、电动工具、工业变频、伺服舵机、空调风机等。
1该文档介绍基于灵动微电子 32 位微处理器 MM32SPIN0280 的电动工具无感方波控制方案, 包括 MM32SPIN0280 芯片资源以及软件说明。 以下是电动工具无感方波控制方案的功能列表:

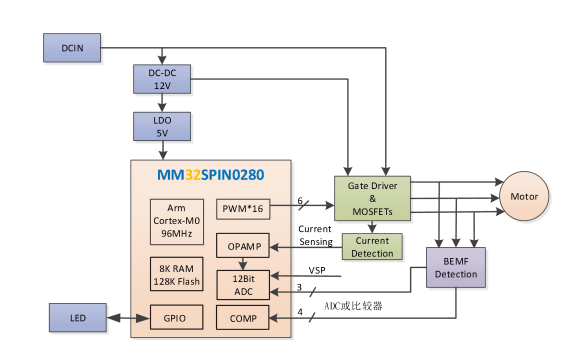
2. 硬件参考设计硬件系统由外部 DC 电源供电, 经降压后得到 12V 给 Gate driver IC 供电以驱动功率开关管,12V 通过降压 IC 输出 5V 给 MM32 SPIN 系列微处理器及其他功能模块供电。通过外部电路检测反电动势过零点信号,对应六种不同的逆变器 MOS 管驱动顺序,实现 BLDC 电机的六步换相。采用 0~5V 的电压输入做为速度命令的来源, 以控制电机转速。 用户转动可变电阻旋钮可以改变此输入电压值,实现无极调速。图 2 是 MM32SPIN0280 方案硬件框图
3. 软件设计3.1 系统时序设计嵌入式程序的设计中最重要的就是时序的设计,无刷直流电机矢量控制的执行需要在嵌入式系统中的定时中断中定期执行,这就需要使用 PWM 和 ADC 的同步机制。本程序中的过零点检测均在 ADC 中断中执行。ADC 的采样由 TIM1 的 CCR4 的值一半的附近触发,如图所示
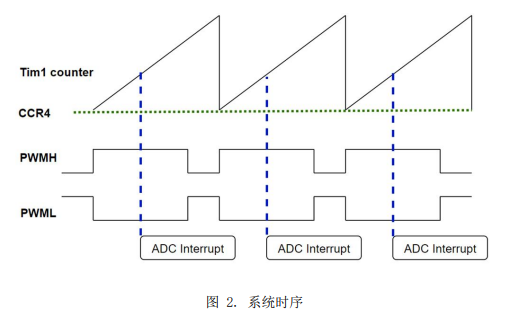
从图中可以看出,在本程序中 ADC 中断周期和PWM周期一致,过零点的检测在换相结束后 的 ADC 中断中对非导通相和母线电压的一半比较完成。
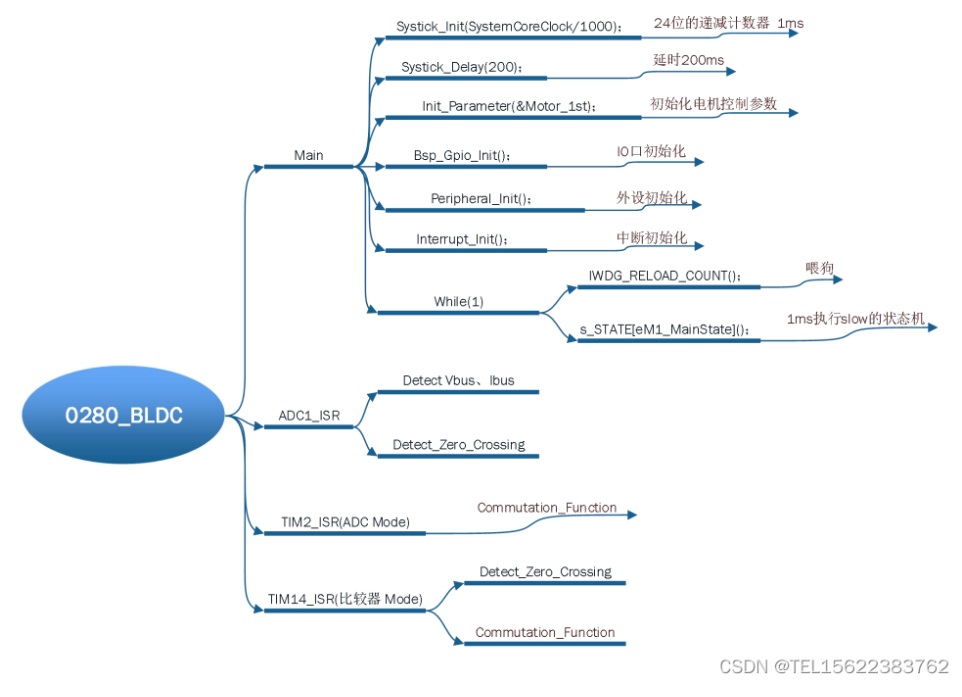
由图可知,系统上电复位后,先执行一段延时函数,等待系统稳定后开始初始化系统外设 及参数,最后使能对应的中断,在 while 循环中执行喂狗及 1ms 一次的慢速环状态机。 1) ADC 法检测过零点时,在 ADC1 中断执行过零点检测,在 TIM2 中执行延时和换相。 2) 比较器法检测过零点时,在 TIM14 中断执行过零点检测,并执行延时和换相。
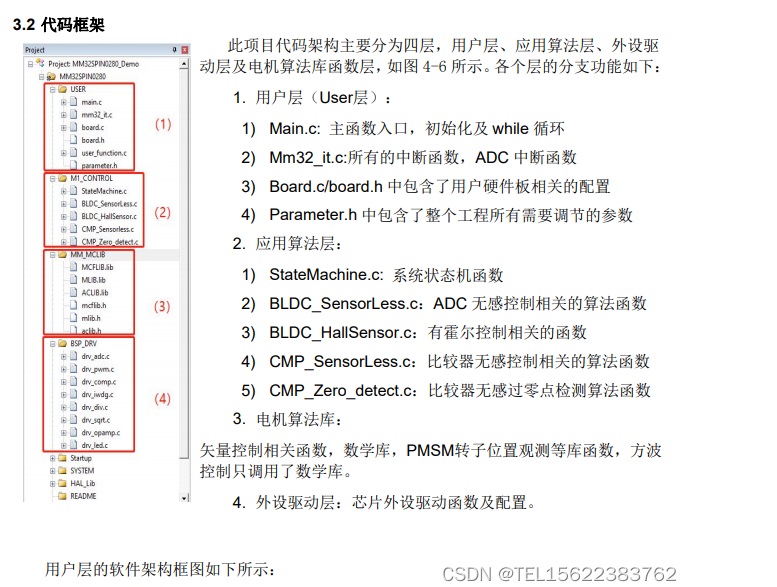
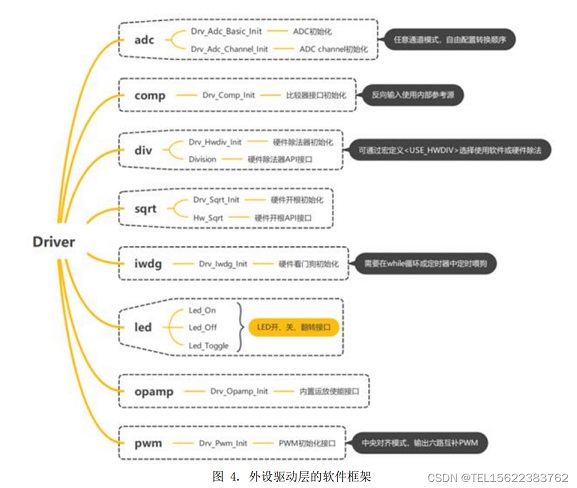
系统驱动层主要包含常用的电机外设的配置如下所示:
3.3 软件流程图 该案整体软件流程设计如下图所示,在 Main()函数主要执行低速任务:1ms 时间片执行电 位器调速和加减速曲线调节。ADC 采样完成中断里读取母线电压、电流、转速命令值以及电机 三相反电动势电压并检测过零点。TIM1 产生 6ch PWM,并启用 break 中断。Systick 中断的定 时可作为系统时基。 1) 使用 ADC 法检测过零点时,将使能 TIM2 中断执行过零点检测以及延时换相功能。 2) 使用比较器法检测过零点时,将会使能 TIM14 中断进行过零点检测以及延时换相功能