Ėę×ųĒÉś»ī½Ś×ą¼ÓæģŅŌ¼°Éś»īĘ·ÖŹµÄ²»¶ĻĢįøߣ¬ÉصŲ»śĘ÷ČĖ³ÉĪŖĮĖÄźĒįµÄ¶¼ŹŠ°×ĮģµÄŠĀ³č”£ÉصŲ»śĘ÷ČĖĶس£ÓÉÖ÷»ś”¢³¾ŗŠ”¢Ņ£æŲĘ÷”¢³äµē׳µČ×é³É”£ÉصŲ»śĘ÷ČĖ²»½öæÉŅŌĶź³ÉĖöĖéµÄÉصŲ¹¤×÷£¬»¹æÉŅŌ×Ō¶Æ»Ų³ä£¬Ķس£Ź¹ÓĆ20VŹŹÅäĘ÷ŗĶ4½Śļ®µē³Ų“®ĮŖ¹©µē”£
ļ®µē³Ų³äµē¹ÜĄķæÉ·ÖĪŖ¼Æ³É·½°øŗĶ·ÖĮ¢·½°ø£¬¼Æ³É·½°øĶس£²ÉÓĆBQ24610»ņBQ24773£ØSMBUS/I2C½ÓæŚ£©,¾ßÓŠ”Ą0.5% ³äµēµēŃ¹ŗĶ”Ą2% ³äµēµēĮ÷¾«¶Č£¬“ųÓŠµēŌ“Ā·¾¶¹ÜĄķ½«ĻµĶ³µēŃ¹ĪȶØŌŚµē³ŲµēŃ¹£¬ĪŽµē³Ų»ņµē³ŲÉī¶Č·ÅµēµÄĒéæöĻĀÖ§³ÖĻµĶ³¼“Ź±Ęō¶Æ²Ł×÷”£
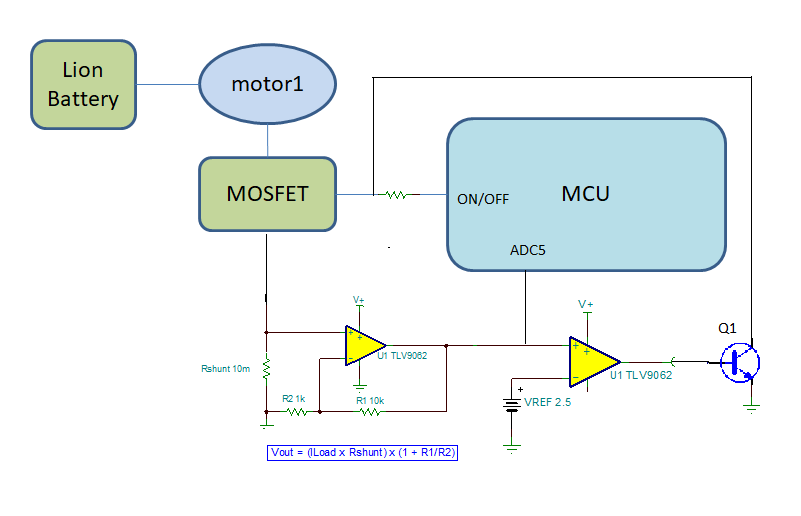
·ÖĮ¢·½°øĶس£ÓÉMCU,MOSŗĶŌĖ·Å¹¹³É£ØČēĶ¼1ĖłŹ¾£©£¬MCUŹµŹ±²ÉŃłµē³ŲµÄ³äµēµēŃ¹ŗĶ³äµēµēĮ÷£¬³äµē½ŲÖ¹µēĮ÷Ķس£ŹĒ³äµēµēĮ÷µÄ1/5~1/10”£ĘÕĶصÄŌĖ·ÅÓÉÓŚ±¾ÉķµÄŹäČėOffsetĘ«ÖƵēŃ¹ (~3mV) ¹ż“ó£¬Ź¹µĆ³äµēµēĮ÷²ÉŃłµÄ¾«¶Č²»øß”£ĄżČē£¬¶ŌÓŚ10mRµÄµēĮ÷¼ģ²āµē×čŌŚ1AŗĶ0.2A³äµēŹ±£¬ŌĖ·ÅŅżĘšµÄ²āĮæĪó²īøß“ļ30%ŗĶ150%£¬¶ų²ÉÓĆTLV9062ĪŖĒ°¼¶ŌĖ·Å£¬Īó²ī½ö3%ŗĶ15%
TLV9062ŹĒĖ«ĶصĄµĶŃ¹5V·Å“óĘ÷£¬ 300uVµÄŹäČėoffsetĢŲ±šŹŹÓĆÓŚøß¾«¶ČµÄµēĮ÷¼ģ²āĒ°¼¶·Å“󣬾ßÓŠ¾ßÓŠ¹ģÖĮ¹ģŹäČėŗĶŹä³ö°Ś·łÄÜĮ¦”£“ĖĶā£¬TLV9062»¹æÉŅŌ×÷ĪŖµēŃ¹·“Ą”Ē°¼¶buffer£¬0.5pAµÄŹäČėĀ©µēĮ÷æÉŃ”ÓĆøü“ó×čÖµµÄ·ÖŃ¹µē×č£¬¼õÉŁĻµĶ³“ż»ś¹¦ŗÄ”£
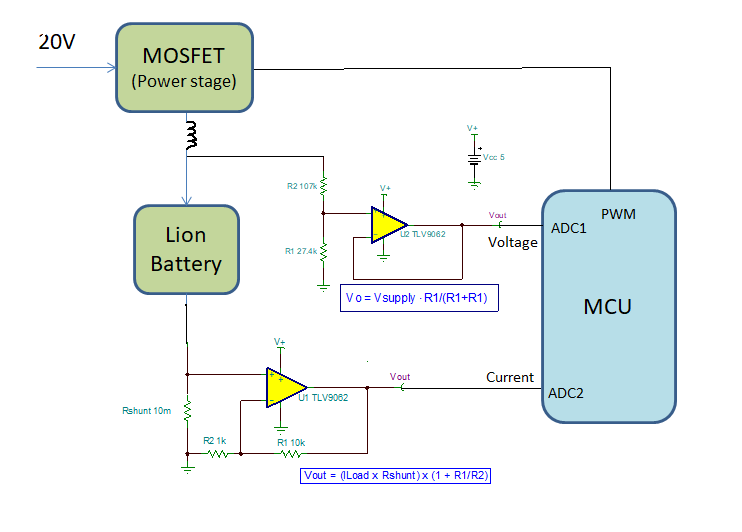
Ķ¼1 TLV9062ÓĆÓŚÉصŲ»śļ®µē³Ų³äµē¹ÜĄķ
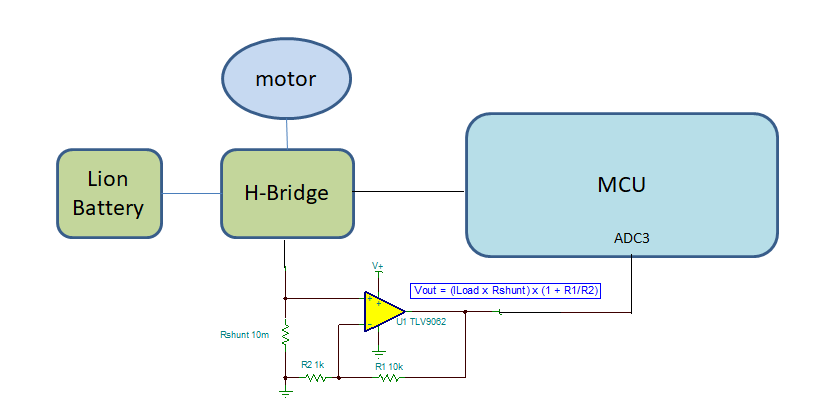
¹öĀÖµÄŗĆ»µ¾ö¶ØĮĖÉصŲ»śĘ÷ČĖµÄÅĄĘĀŌ½ÕĻÄÜĮ¦£¬¹öĀÖ¶ÆĮ¦Ō½Ēæ¾¢£¬ŌņÉصŲ»śĘ÷ČĖµÄ“©ĖóÄÜĮ¦¾ĶŌ½øߊ§”£æ¼ĀĒµ½Źµ¼ŹÓ¦ÓĆÖŠæÉÄÜŅżĘš¹öĀÖ¹żŌŲ»ņ¶Ā×Ŗ£¬MCUŠčŅŖŹµŹ±Č„²ÉŃł¹öĀÖµē»śµēĮ÷²¢×÷ĻąÓ¦µÄ±£»¤¶Æ×÷£¬TLV9062Ķ¬ŃłŹŹÓĆÓŚÖ±Į÷µē»śµēĮ÷Ē°¼¶·Å“ó£¬ČēĶ¼2£¬10Mµ„Ī»ŌöŅę“ųæķČĆÉč¼ĘÕß»ńµĆøüŠ”µÄŠÅŗÅŃÓŹ±ŗĶŹ§Õę”£
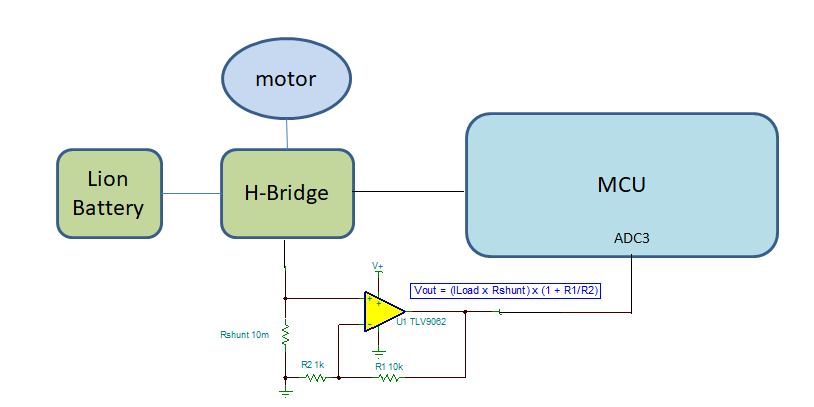
Ķ¼2 TLV9062ÓĆÓŚÖ±Į÷µē»śµēĮ÷Ē°¼¶·Å“ó
ÄæĒ°“ó²æ·ÖµÄÉصŲ»śµÄ±ßĖ¢µē»śĒż¶Æ¶¼ŹĒ²ÉÓƵ„MOS¹ÜPWMĒż¶Æ·½Ź½£¬µ±±ßĖ¢ÉĻ²ųČĘ¹ż¶ąĆ«·¢£¬¾Ķ»į²»æɱÜĆāµÄ»į³öĻÖ±ßĖ¢µē»ś¶Ā×ŖµÄĒéæö£¬ŃĻÖŲŹ±æÉÄÜÉÕ»Łµē»ś”£Ķ¼3µēĀ·²ÉÓĆTLV9062×÷ĪŖµē»śµēĮ÷Ē°¼¶·Å“ó£¬ĖĶÖĮADC²ÉŃł¼ąæŲµēĮ÷£¬ŗ󼶲ÉÓĆTLV9062×÷ĪŖ±Č½ĻĘ÷£¬µ±µē»ś¶Ā×ŖŹ±æģĖŁ¹Ų¶ĻMOS¹Ü£¬±£»¤±ßĖ¢ĻµĶ³”£øƵēĀ·ĪŖĪŽÖĶ»Ų±Č½ĻĘ÷£¬TLV9062Ņ²æÉŅŌÉč¼ĘĪŖ“ųÖĶ»Ų±Č½ĻĘ÷£¬ĻźĻøĒė²Īæ¼Ó¦ÓĆŹÖ²įSOBA219”£
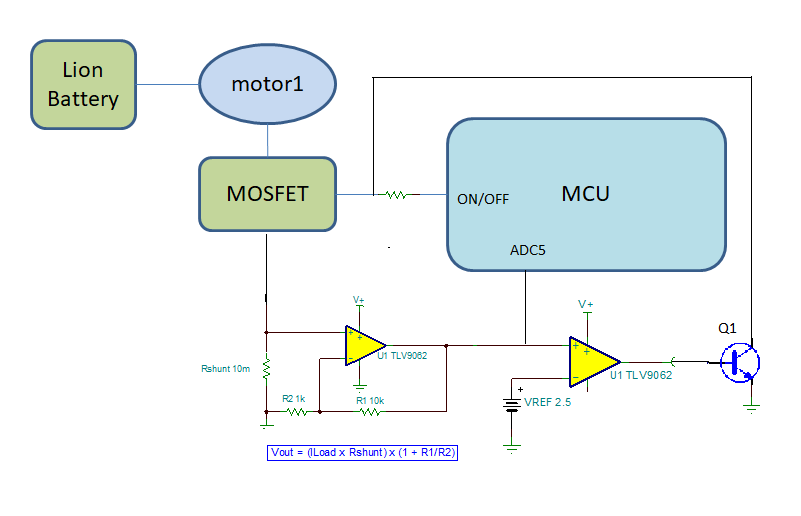
Ķ¼3 TLV9062ÓĆÓŚÖ±Į÷µē»ś¶Ā×Ŗ±£»¤


{kind=link}
{kind=link}
{kind=link}