
在机器人出现以前,过去的马达驱动IC基本上都是应用在遥控车和航模上,而现在舵机为了要应用在机器人身上,所以增加更多的功能及较快的反应时间,等于基本上都是由机器人公司自行独立开发。
一般应用在机器人身上的舵机都是采用MCU,特别是人形机器人,因为动作的马力大,以及需要持续的动作,所以一般的马达适用不了,因为死区较大,容易造成定位误差。
因此,舵机在MCU进行运算时,常常会因为马达驱动的反应速度,导致电位计无法达到定位,出现抖动现象。
很多制作人形机器人的企业,在制作的过程中都会被舵机问题难倒,因为机器人体积的不一样,会让制作的舵机有大小,舵机越小,越难把控力道。
台湾晶致半导体股份有限公司(简称:晶致半导体)应用工程师陈韦缙说:“晶致半导体可以在电路方案上简化,节省空间,从而可以放更多的元件。因此,有办法在足够力道的情况下,把舵机做小。”
虽然舵机缩小了,但是还是很难保证它的稳定性,陈韦缙说:“晶致半导体可以把马达驱动模组的死区时间缩短,这样可以使得PID运算及马达做动能的结果更精准,也可以提高控制精准率。”
因为人形机器人对舵机的要求很高,从目前市面上反馈的情况来看,损坏率最高的部件也是舵机,到目前为止,我们还没有更好的解决方案。
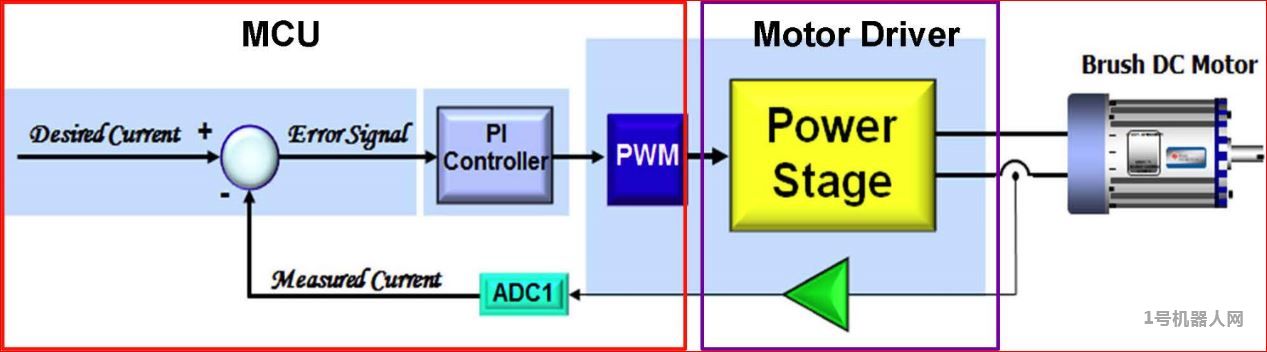
但是晶致半导体AMtek马达驱动较一般的驱动IC多了一个电流侦测电路,并可以回授电流大小给MCU,陈韦缙说:“我们可以使用更多的回授方式,让MCU了解整个机器人的状况,从而做出更正确的判断。可以大幅提高舵机的精准度和稳定性。”
舵机缩小化必然是未来的发展趋势,现在舵机每撘组一个H-bridge需要至少 10个元件才能组成,但是在舵机微型化的趋势下,已经越来越难以放入舵机,但是AMtek可提供整合度更高及较小封装的产品,以减少线路复杂度及零件数,这将给机器人企业制作人形机器人带来极大的帮助。

