电路保护技术和电路板布局策略有助于提高安全性、可靠性和连通性。可穿戴技术存在一个不可能出现在物联网中的弱点:人体在移动时产生静电。静电可能损坏支撑物联网应用的敏感电子设备。
为了理解这个问题,我们从人体放电模型(H B M)开 始,应用于描述集成电路对静电放电(ESD)破坏的敏感性。 使用最普遍的H B M 概念是军用标准M I L - ST D - 8 8 3 、 方法3015.8、静电放电灵敏度分类中定义的试验模型。相似的 国际HBM标准是JEDEC JS-001。无论在JEDEC JS-001还是在 MIL-STD-883中,都用100pF电容器和1.5kΩ放电电阻器模拟 带电人体。测试中,电容器在250 V到8 kV的电压范围内完全 充电,然后通过与受试器件串联的1.5kΩ电阻器放电。
由于可穿戴设备设计为可以贴身使用,它们持续受到 因为与用户近距离相互作用而产生的静电冲击。如果没有适 当的保护,可穿戴设备的传感器电路、电池充电接口、按钮 或数据输入/输出端口有可能被与HBM试验中产生的相似的 程度静电放电(ESD)损坏。一旦可穿戴设备失效,整个网络 的功能和可靠性也会受到影响。
先进电路保护技术和电路板布局策略能保护可穿戴设 备及其使用者。尽早在设计过程中运用这些建议将帮助电路 设计者们提高其可穿戴技术设计的性能、安全性和可靠性, 并有助于构建更加可靠的物联网。
封装尺寸虽小,但ESD保护作用不小
可穿戴设备电路保护的一个设计挑战是可穿戴设备的 尺寸越来越小。过去,需要大结构二极管和大封装尺寸(如
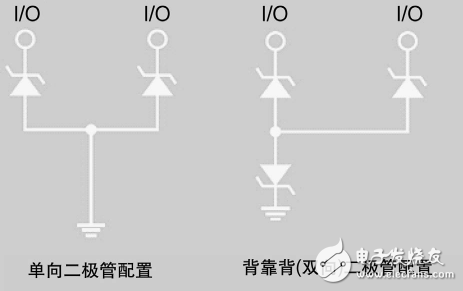
图1 TVS二极管两种结构
图2 IEC 61000-4-2评级
设计人员应尽可能选择单向二极管配置,因为它们在 负电压ESD冲击事件中的表现更好。负电压ESD冲击期间, 钳位电压将基于二极管的正向偏压(一般小于1.0 V)。反之, 双向二极管配置在负电压冲击期间提供的钳位电压基于反向 击穿电压,比单向二极管的正向偏压高。因此,单向配置能 大大减小负电压冲击期间对系统产生的压力。
合理确定二极管位置。大部分可穿戴设计不需要在每 个集成电路引脚上都使用板级T VS二极管。相反,设计人员应该确定哪些引脚暴露在可能发生用户可能产生ESD事件的。如果用户能接触通讯/控制线路,这可能成为ESD进入 集成电路的一个途径。倾向于存在这种途径的典型电路包 括USB、按钮/开关控制和其他数据总线。由于添加这些分 立器件设备需要占用电路板空间,因此需要能装入0201或01005封装的器件。对某些可穿戴应用来说,可采用节省空 间的多通道阵列。无论采用什么封装类型,ESD抑制器的位 置要尽量靠近ESD源。比如,USB端口的保护应靠近USB连 接器。
缩短走线长度。走线布线在针对集成电路引脚的TVS二 极管保护设计中非常重要。与雷电瞬态不同,ESD不会长时 间释放出大量电流。处理ESD时,一定要尽快把电荷从受保 护的电路转移到ESD参考点。
首要因素是从信号线到ESD器件和从ESD器件到地的走 线长度,而非地的走线宽度。为了限制寄生电感,走线长度 应该越短越好。寄生电感会导致感应过压,这是一种短促 的电压尖峰,如果桩线够长的话,这个电压尖峰可能达到数 百伏特。近期的封装技术进步包括能直接装在数据车道上的?DFN轮廓,这样桩线就不再需要了。
理解人体放电模型(HBM)、机器放电模型(MM)和带电 设备模型(CDM)的定义。除了HBM模型之外,MM和CDM 也是描述运行便携设备或可穿戴设备的集成电路ESD耐受能 力的试验模型。不少半导体厂家认为MM模型已经过时。人 们倾向于在坚固性和产生的失效模式上跟踪HBM,尽管有 些厂家仍在使用它。CDM是HBM的另一个替代模型。与模 拟人与集成电路之间的相互影响不同,CDM模拟集成电路 滑向走向或管子,然后触及接地表面。按CDM分类的器件 在指定电压水平上接触电荷,然后测试存活率。如果器件仍 然功能正常,就在下一个电压水平上继续测试它,直到它失 效。CDM由JEDEC在JESD22-C101E中标准化。
包括处理器、内存和ASIC在内的芯片都会用这三个模 型中的一种或几种来描述。半导体供应商在制造期间使用这 些模型保证电路的健壮性。对于供应商来说,当前趋势是降 低电压测试水平,因为这样能节省晶片空间,也因为大部分 供应商遵守严格的内部ESD政策。
严格的ESD政策通过运行较低的片上ESD保护,能使供 应商受益,电路设计人员还是以对应用级ESD十分敏感的芯 片,决不允许因为现场ESD或用户致ESD而失效。为了保护 高度敏感的集成电路,设计人员选择的保护器件不仅要能防止增强的静电应力,还要能提供足够低的钳位电压。评价ESD保护器件时应考虑以下参数:
1. 动态电阻:这个参数描述的是二极管钳制并将ESD瞬 态对地转移的能力。它能帮助确定在二极管打开后其电阻会 低到什么程度。动态电阻越低越好。
2. IEC 61000-4-2评级:TVS二极管供应商确定该参数 值的方法是增大ESD电压,直到二极管失效。失效点描述 的是二极管的健壮性。这个参数值越高越好。越来越多的 Littelfuse TVS二极管能达到20 kV乃至30 kV的接触放电电压,远远超过IEC 61000-4-2规定的最高水平(4级水平的接触放电电压为8 kV,如图2)。
随着可穿戴市场的继续成长和新设备的不断开发,电 路保护需求也在日益增长。事实上,在设计过程的早期考虑 ESD保护和适当的电路板布局变得比以往任何时候都更加重 要。诸如TVS二极管这样的小型电路保护器件将有效保护可 穿戴设备内部的敏感集成电路,维护物联网生态系统价值主张。
可靠的长时间跟踪算法。该算法研究的出发点是单独地运用现有跟踪算法或检测算法都无法长时间地跟踪目标。Kalal创造性地将跟踪算法和检 测算法相结合来解决跟踪目标在被跟踪过程中发生的形变、 部分遮挡等问题,同时,通过一种改进的在线学习机制不断 更新跟踪模块的“显著特征点”和检测模块的目标模型及相

飞行器识别出地面机器人

飞行器保持在地面机器人上

油门行程与飞行器高度
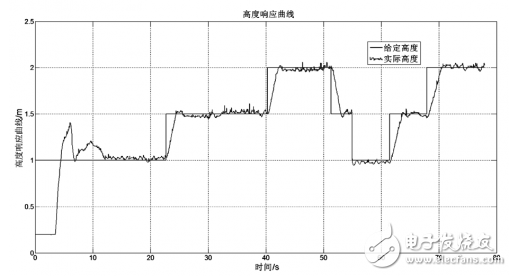
基于开关控制的飞行器高度控制响应曲线
在此系统中,为了保持好的追踪效果。根据地面机器 人在图像中的位置,引入一个PD控制器,使飞行器保持在地面机器人上方。控制器的输入是摄像头画面中央的像素位置,反馈值是实际捕捉到的地面机器人在图像中的位置,控制框图如图7所示,根据实验调整PD参数而使地面机器人保 持在图像的中央。图8显示了飞行器识别出的地面机器人, 图9显示飞行器正在跟踪地面机器人。
高度控制算法
根据实际飞行器实验和悟空控制系统的说明,测试到 油门信号与飞行器的实际升降有对应关系,具体如图10所 示。油门PWM信号占空比分子在1000到2000之间变化,当 在1450到1550之间时,悟空控制系统会使飞行器会自动锁定 当前高度,根据这一特点设计了开关控制器,当高度低于给 定值将占空比分子设置成1580,这样飞行器会缓缓上升。当 高度高于给定值时设成1430,这样飞行器缓缓下降。并设置 实际值在给定值上下5cm不作控制,即自动锁定当前高度。 如图11,实验时给定值在0.5m―1m―1.5m切换时,飞行器 能及时达到给定值。在打舵的时候,飞行器高度会有所改 变,该控制器也能及时调整达到设定高度。图11中直线表示 给定高度,绿线表示飞行器的实际高度,在时间10s附近开 启高度控制器。
结束语
基于国际空中机器人大赛第7代任务,本文提出了一种 机载设备的实现方法,并详细介绍了该方法的硬件平台和软 件模块。此方法完成了定位、高度控制、障碍物规避和单一 地面机器人识别与跟踪。飞行器续航能力有限且比赛时间有 一定要求,所以要完成比赛a阶段的追赶目标,上层的策略 模块还需要进一步完善。比赛的b阶段增加了飞行器的同台 博弈,因此还需要更多的实验以增加系统的鲁棒性。

