����: Maksim Apanasenko, Boaz Kramer, Ze'ev Kirshenboim.
ACS Motion Control
����
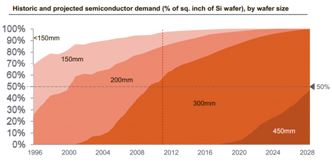
���ҵӦ��, �뵼�徧Բ����ϵͳ, �л����������ƽ����ʾ�������ͼ�⣬,��ЩӦ��Ҫ����ߵ��˶����ܣ��ڵ��������˶��������˶��б����������ľ�ֹ����������Ŀǰ�����ŷ������Ѿ���Ӧ����������Щ�����������͵��������ṩ�˾��˵����ܣ����Դﵽ��ЩӦ����Ҫ�����Զȡ��������������ŷ�������Ч�ʵͣ�����Ĵ�������ء���һ��450mm�뵼���Ŀǰ��300mm�뵼���ö࣬����������ϵͳ��Ҫ���������и��ߵ����������ߵĵ�ѹ�͵��������Ҫ����������������dz��������������ޣ�������������ϵͳ�����ܺ���������������ϵͳ�ɱ���������ϵͳ�ɿ��ԡ�
NanoPWM�ǿ���PWM�����������Ի����������Ի�����һ�ֶ��ص�ר��������
�ڹ�ȥ5����ACS�з���PWMBoost��������������λ��ϵͳ��NanoPWM�������ṩ���õ�λ�����ܺ������ܣ����ҿ˷���������������ȱ�㡣NanoPWM�dz����գ��и��ߵ�Ч�ʺͿɿ��ԣ������ṩ���ߵ������������͵�Դ�����Ҹ����á�
�ŷ�������������
������Ҫ���ŷ��������������������Ϳ���PWM��������
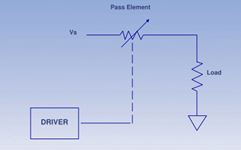
ͼ1�����������������ԭ����ͼ�������������һ���ɱ����һ�����������ݵ�����������迹���ڵ����������ѹ�������������������֮ǰ���������Ե������б�Ҫ���ṩ������ʱ���������Ǹߵģ����������ϵĵ�ѹ���ǵ͵ģ������������ϵĵ�ѹ���Ǹߵġ���ʱ������������Ǻܸߵġ�
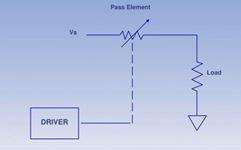
ͼ1������������ԭ��ͼ����
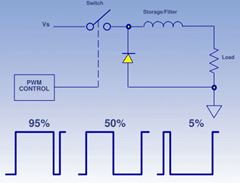
ͼ2�����˿���PWM������ԭ��ͼ��ͼ����������Ϊͨ�Ͽ��ع�����������Ϊƽ���������ۺϼ��ɡ�ƽ�������ǿ���ռ�ձȵ����Ժ������������ʱ�̿��ػ����ǶϿ��ģ�û�е����������أ������ǵ�ͨ�ģ��е͵�ѹ���ڿ����ϣ�����˿�������Ǻܵ͵ġ�

ͼ2��PWM��������ԭ��ͼ����
.
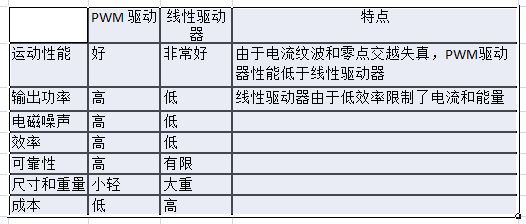
��1.������������������ȱ���ܽ�
��1����������������ȱ��

����

��3-�뵼�徧Բ��ͼ
�뵼�徧Բ���ϵͳҪ���������ľ�ֹ�����������������죬�����ϵͳ��Ϊ�˴���ֱ��300mm �ľ�Բ����һ����Բ��ֱ�����ﵽ450mm����Ҫ����ͬ�����߸��õ�λ�ÿ������ܣ����ڳߴ����������������Ҫ���������������������ֺ����ϵͳ����������������ϵͳҪ������������������������PWM�������ŵ㡣NanoPWMTM���������������������ܸ�Ч������ʵ�ָߵ�ѹ�������ṩ�ߵ��������ܽ��ն��ҳɱ����͡�
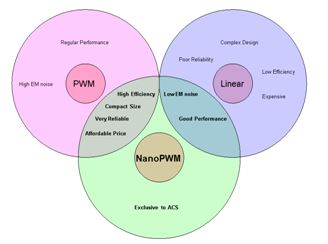
ͼ4��5������NaonPWM����Ҫ�ص㡣
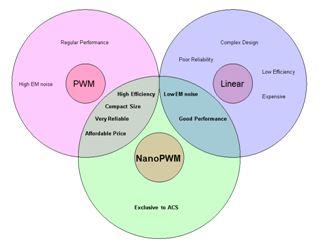
lowEM noise :�͵������
good performance�����õ�����
High efficiency������
Compact size���ṹ����
Very reliable���dz��ɿ�
Affordable price���ɽ��ܵļ�λ
Regular performance��һ������
High EM noise ���ߵ������
Complex design����Ƹ���
Poor reliability ���ɿ��Խϲ�
Low efficiency��Ч�ʵ�
Expensive����۸�
ͼ4-NanoPWM������������������PWM���������ŵ�

ͼ5-��ͬ���ʵ�������������PWM�������ijߴ�Ա�
���ܱȽ�
����ϵͳ����һ��������ֱ�����������ֱ��ƽ̨�����������л�е�ͻ����ֱ���Ϊ0.4mico-meter��magnascale����ģ����SIN-COS���������˶�����ϵͳ����ACS MC4U����ģ������ֲ�ͬ��������
• NanoPWM
• Standard PWM��PWM������
• Standalone linear drive��������������
��ÿ�������У����������㷨������һ���ĵ���ʹ��ﵽ�������ܺ����ƵĴ�����
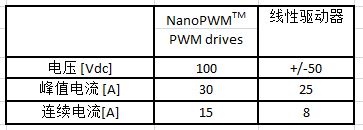
���2��������������������ͬ������

Table 2 �C ����������Ҫ����ָ��
������������ָ�꣺
��ֹ����
���ٸ������
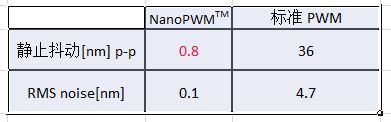
��ֹ��NanoPWMvs����������
���Խ���ڱ�6�У��ܽ��ڱ���3��
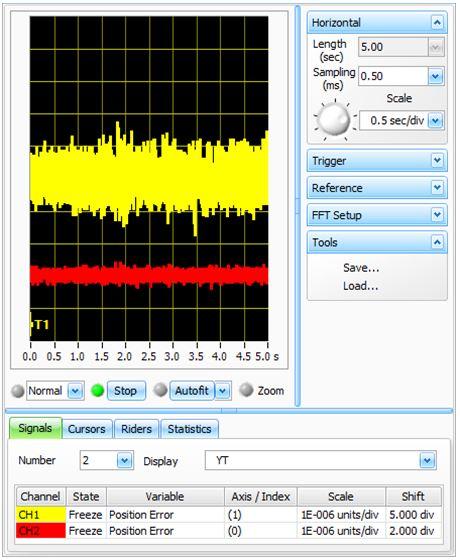
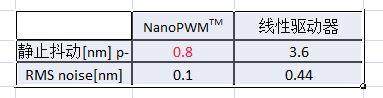
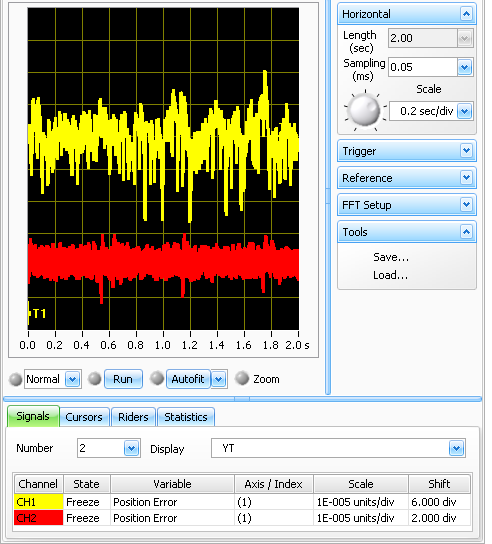
��6 �CNanoPWM����ɫ��VS��������������ɫ����ֹ����

Table 3 - NanoPWM (��ɫ) VS ���������� (��ɫ) ��ֹ����
ʹ��NanoPWM��������ʹ������������ʱ�ľ�ֹ�������Լ�С��С4.5����0.8nmVr3.6nm��
���ٸ������-NanoPWM VS����������.
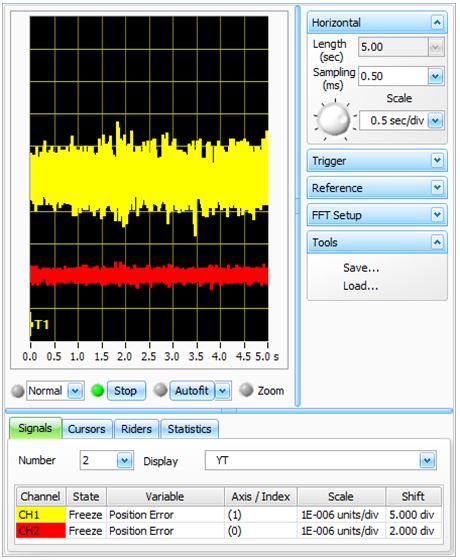
�����������1mm/s���ٶ��²����ģ����Խ���ڱ�ͼ7�У��ܽ��ڱ���4��

ͼ7 NanoPWM����������ɫ��VS��������������ɫ���ĸ������
NanoPWM ����������

Table 4 - NanoPWM (��) VS���������� (��) �������
ʹ��NanoPWM������ʱ����������Լ�С������õ���ƽ�����˶��켣�������Ĺ켣�ھ�Բ��������ʮ����Ҫ��
��ֹ���-NanoPWM VS��PWM������
���Խ����ͼ8����5�������ܽ�

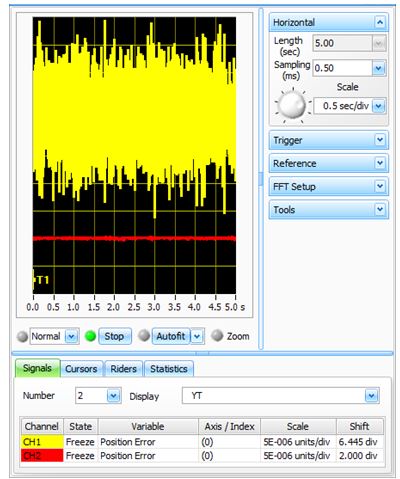
ͼ8-NanoPWM����ɫ��vs PWM����ɫ����ֹ����

Table 5 - NanoPWM (��ɫ) VS PWM drive (��ɫ) ��ֹ����
ʹ��NanoPWM�������ľ�ֹ����ʹ�ñ�PWM������С������������ƽ����ʾ���ӹ�ϵͳ�Ƚ��Ӵ��������ѹ�͵�����Ҫ����Ŀǰ��ҵ���˵���������������������л�LED��ʾҪ����ߵľ�ȷ�ȣ����澫�Ⱥ;�ֹ��������Ҫ�ڼ���������Χ�ڡ�NanoPWM����������������˽��������
�ܽ�
���Ľ�����һֱ���͵����Կ����ŷ�������-NanoPWM,��������������������������PWM�������������ŵ㡣ʹ��NanoPWM�������õ����˶����ܳ�����Ŀǰ�Ѿ���ҵ���˵������ŷ������������ܡ�������������С�����ɿ��������ˡ�
��������������������ߵ��˶����������ʺϰ뵼�徧Բ����ƽ����ʾ������ϵͳ��